飛行制御プログラム開始直後の注意点
Phenox は飛行制御プログラム開始から 3 秒後に、ジャイロセンサのキャリブレー ションを行います。その際には、機体を必ず地面の上に静止させるようにし、手に持つことなどは しないで下さい。なお、飛行制御プログラムの開始 (CPU1 の起動) とは、Linux から C 言語関数 pxinit_chain を実行することを意味します。(ライブラリ参照)
飛行中の Phenox を止める方法
Phenox の足の一つ,あるいはプロテクタを捕まえて、大きく傾けることで、無条件に Phenox のプロペラの回転を止める ことができます。心配な方は軍手など をはめ、手を保護することをお勧めします。実験の際は、必ず保護メガネを着用してください。
電池交換時のメイン基板への配慮
サイズ上の制限から、電池コネクタへのアクセスが難しくなっております。基板は薄い構造のため曲がりやすく、過度の曲げモーメントがかかった場合、IC とプリント基板の間で接触不良が発生する場合があります。そのため、基板から電池を外す際には基板を曲げないように配慮するようにしてください。繰り返し電池を取り外すことが難儀な場合は、治具を作成することをお勧めします。
Phenox2 を飛行させる環境
Phenox2 は下向きカメラと超音波センサを使って自己位置を推定します。Phenox2 を飛行させる際は必ず、3m x 3m 以上の平坦な地面を確保し、図1のように、画像特徴点として検出できるようなコントラストの多い模様を用意してください。
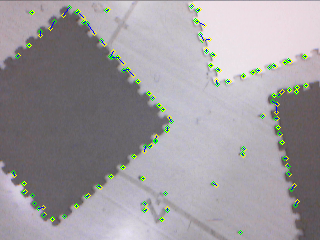
図 1 特徴点の多い床面